

全轮动力和转向驱动的轻量化特种移动平台设计
摘要:针对当前多轮移动平台的轮系上动力驱动和转向驱动需要单独设置动力源而导致的驱动机构数量过多、体积和重量大和控制精度差等问题,本文设计了一种全轮动力和转向驱动的轻量化特种移动平台,实现对移动平台的全轮独立动力驱动和转向驱动,降低轮组体积和重量,提升轮组移动和转向时的线性度和系统的自动化、智能化水平。
1.设计背景
轮式行走机构因摩擦和阻力小、转向性能好等被广泛应用于各类复杂场合,如全轮驱动的汽车、军事特种机器人等[1]。由于需要对每个轮组单独动力驱动和转向驱动,轮组上动力驱动电机和转向电机的重量和尺寸等参数将直接决定全轮移动平台的运动特性[2]。目前采用每个轮组单独直连驱动、或左右轮组、前后轮组共用驱动电机方案,存在轮组体积庞大、成本高、控制困难等问题。在全轮转向驱动方案中,由于动力驱动组件和转向组件间存在耦合,会存在增加驱动轮组体积和成本等难题 。
2.结构设计与组成
全轮动力和转向驱动的轻量化特种移动平台包括:全轮驱动组件1、全轮转向组件2、车轮组件3、平台骨架4。其中,全轮驱动组件实现对车轮组件的全向动力驱动,全轮转向组件则可实现对车轮组件全向转向驱动,如图1所示。
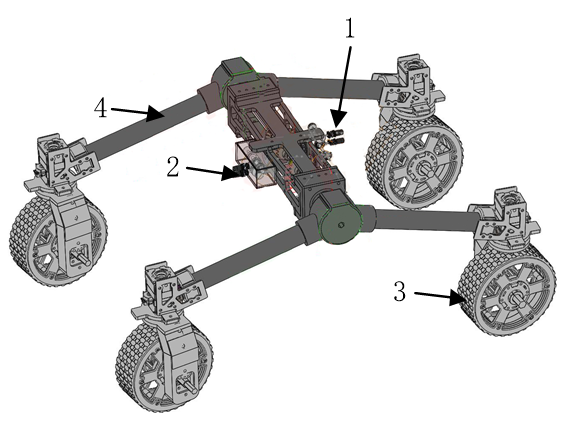
图1 移动平台结构图
(1)全轮驱动组件设计
全轮驱动组件1包括:动力驱动源1-1、动力波箱1-2、动力传递组件1-3。其中,动力驱动源为轮组的全向驱动提供动力,连接动力波箱;动力传递组件则将动力进行方向、大小转换和动力分配,实现对轮组的动力传递功能,如图2。
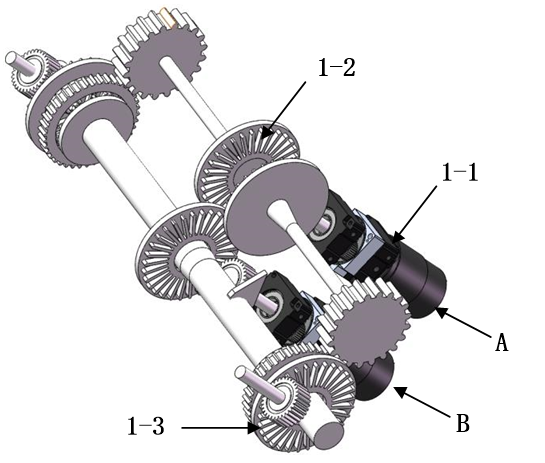
图2 全轮驱动组件结构图
动力驱动源包括:第一动力电机A、第一动力减速箱、第二动力电机B、第二动力减速箱。
动力波箱包括:第一动力转轴、第二动力转轴、第一动力齿轮、第二动力齿轮、第三动力齿轮、第四动力齿轮、第五动力齿轮、第六动力齿轮、第七动力齿轮、第八动力齿轮、第九动力齿轮、第十动力齿轮、第三动力转轴、第四动力转轴、第五动力转轴、第六动力转轴。
动力传递组件包括:动力传递第一齿轮、动力传递第二齿轮、动力传递第一转轴、动力传递第三齿轮、动力传递第四齿轮、动力传递第二转轴、动力传递第五齿轮、动力传递第六齿轮、动力传递第三转轴、动力传递万向节、动力传递第七齿轮、动力传递第八齿轮。
(2)全轮转向组件设计
全轮转向组件2包括:转向驱动源2-1、转向波箱2-2、转向传递组件2-3。转向驱动源为轮组的全向回转提供转向动力,连接转向波箱;转向传递组件则将动力进行方向、大小转换和动力分配,实现对轮组全向回转驱动的动力传递功能,如图3。
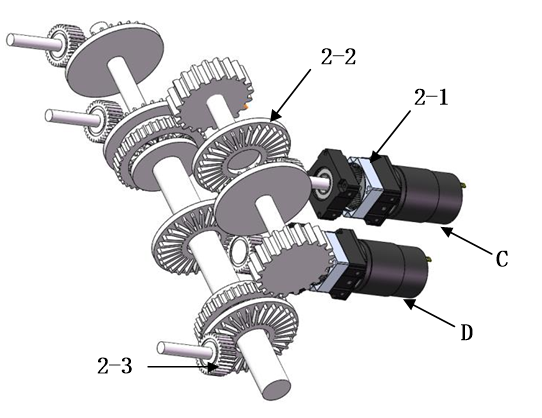
图3 全轮转向组件结构图
转向驱动源包括:第一转向电机C、第一转向减速箱、第二转向电机D、第二转向减速箱。
转向波箱包括:第一转向转轴、第二转向转轴、第一转向齿轮、第二转向齿轮、第三转向齿轮、第四转向齿轮、第五转向齿轮、第六转向齿轮、第七转向齿轮、第八转向齿轮、第九转向齿轮、第十转向齿轮、第三转向转轴、第四转向转轴、第五转向转轴、第六转向转轴、第十一转向齿轮、第七转向转轴、第十二转向齿轮、第八转向转轴。
转向传递组件包括:转向传递第一齿轮、转向传递第二齿轮、转向传递第一转轴、转向传递第三齿轮、转向传递第四齿轮、转向传递第二转轴、转向传递第五齿轮、转向传递第六齿轮、转向传递第三转轴、转向传动第七齿轮、转向传动第八齿轮、转向传递第四转轴转向传动第九齿轮、转向传动第十齿轮、转向传递第五转轴、转向传动第十一齿轮、转向传动第十二齿轮、转向传递第六转轴。
3. 轻量化特种移动平台驱动原理
(1)全轮同步前进或后退驱动
当移动平台全轮前进时:
ⅰ. 第一动力电机:不动作;
ⅱ. 第二动力电机→第二动力转轴→第四动力齿轮→第六动力齿轮→第七动力齿轮→第八动力齿轮→第八动力齿轮→第六动力转轴→第二转轴→第三转轴→第七齿轮→第八齿轮→车轮正向前进。
ⅲ. 第一转向电机:不动作;
ⅳ. 第二转向电机:不动作。
当移动平台全轮后退时,过程类似相反。
(2)全轮同步转向运动驱动
当移动平台全轮原地顺时针转向时:
ⅰ. 第一动力电机→第一动力转轴→第十动力齿轮→第一齿轮→第四齿轮→第三转轴→车轮反向驱动行进。
ⅱ. 第二动力电机:不动作;
ⅲ. 第一转向电机→第一转向转轴→第五转向齿轮→第六转向转轴→转向传递第六齿轮→转向传动第九齿轮→转向传递第六转轴,左后轮和右前轮反向转向调整。
ⅳ. 第二转向电机:不动作。
当移动平台全轮原地逆时针转向时,过程类似。
4. 结束语
本文采用动力分布驱动和转向分散驱动方法,设计了一种全轮动力和回转驱动的轻量化特种移动平台,可用于轮式移动特种、军事等机器人等。该平台实现了对轮组的全向动力驱动和转向控制,有利于多轮移动平台的微型化和轻量化。
参考文献
[1] 朱磊磊, 陈军. 轮式移动机器人研究综述[J]. 机床与液压, 2009, 37(8):242-247.
[2] 王晓芸,等. 轮式移动机器人文献综述[J]. 石家庄铁路职业技术学院学报, 2019(2).
[3] 付宜利, 等. 轮式全方位移动机器人几种转向方式的研究[J]. 制造业自动化(10):36-40.
本文由入驻作者撰写,未经授权禁止转载。
免责声明:本网站内容来自作者投稿或互联网转载,目的在于传递更多信息,不代表本网赞同其观点或证实其内容的真实性。文章内容及配图如有侵权或对文章观点有异议,请联系我们处理。如转载本网站文章,务必保留本网注明的稿件来源,并自行承担法律责任。
为你推荐



汽车行业应用BI,应该从哪个环节入手?
2025-01-10【走近匠人】周顺平:学无止境,方能成就匠心!
2025-01-102025世界机器人大会“领航峰会”大咖观点集锦
2025-01-102025世界机器人大会“未来峰会”大咖观点集锦
2025-01-10社区智能化解决方案
2025-01-04智慧医院解决方案
2025-01-04打造智能化小区解决方案
2025-01-04
推荐产品



推荐直播

直播回顾

微信扫码进入直播间
国兴智能
山东国兴智能科技股份有限公司

直播回顾

微信扫码进入直播间
云展会介绍

ABB

直播回顾

微信扫码进入直播间
配件机器人-零件介绍
ABB

直播回顾

微信扫码进入直播间
服务机器人-扫地机器人介绍
ABB
