

履带式特种消防侦察灭火机器人研发与应用
摘要:针对当前因火灾、爆炸等灾害对人类造成的人员伤亡和财产损失难题,本文研制了面向高危恶劣环境的履带式特种消防侦察灭火机器人。机器人具备现场侦察和超远程定点灭火功能,还具备自降温保护和远程自动化作业特征。针对机器人在易燃易爆以及复杂地面环境场景,还重点突破了机器人自喷淋降温技术、高防护技术、动力学优化的轻量化技术等技术,进一步提升机器人运动技术指标,多次实地演习和火灾扑救证明了消防侦察灭火机器人的有效性和必要性。
1. 消防侦察灭火机器人研发背景
每年因为火灾、化学危险品和放射性物质等泄露及燃烧、爆炸、坍塌事故造成很多消防战士牺牲,给人民生命和财产带来重大损伤[1-2]。目前国内外市场上的消防侦察灭火机器人普遍存在防护等级低、运动性能和控制性能弱等问题,机器人代替人工进入高危场所作业和救援还存在很多问题亟待解决,现有消防侦察和灭火机器人无法满足技术和市场需求,当前面向高危灾害场所的防爆型消防侦察和灭火机器人市场需求巨大 [3-4]。另外,国家十三五创新规划、国家重点研发项目指南中均特别提出研究社会安全支撑保障关键技术,重特大火灾防治与扑救技术,开发适合易燃易爆工业区域,人员密集场所、森林、地下设施和交通运输设施等特殊场所的新型火灾预警和抑制系统[5]。
2. 消防侦察灭火机器人整体结构设计与组成
针对上述需求,本文设计了适用于高危恶劣场所的特种消防侦察灭火机器人和对应的地面控制指挥系统,系统结构图如图1所示。侦察灭火机器人主要包括:1.履带式特种底盘(1-1.本体、1-2.悬挂系统),2.侦察组件(2-1.摄像系统、2-2.升降系统、2-3.环境探测传感器组),3.灭火组件(3-1.消防水炮、3-2.水带接口),4.自喷淋组件,5.无线通讯组件,6.避障测距组件,7.运动驱动组件,8.手持控制台。
其中,侦察组件有两种功能:1.当机器人作为灭火机器人在火场外围喷水灭火时时,通过控制升降系统的上升和下降,可实现摄像系统的高度变换,从而观测前方灭火情况;2.当机器人作为侦察机器人进入火灾现场侦察时,环境探测传感器组和摄像系统可实现对灾情的探测。同时通过控制升降系统的上升和下降,可实现对现场不同高度的危险气体等浓度参数进行探测,以便后续分析和决策。
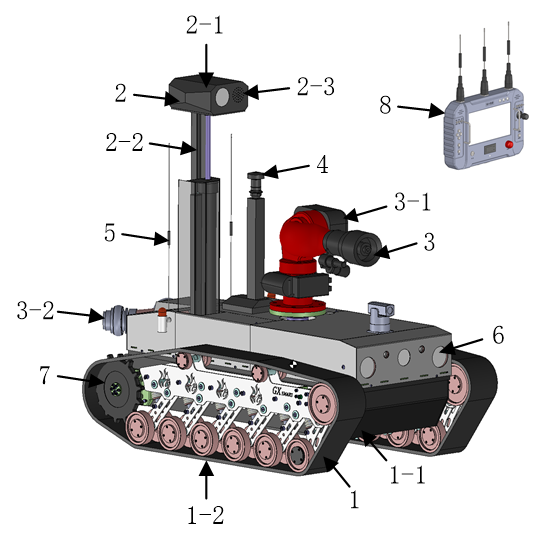
图1 消防侦察灭火机器人机械系统结构图
在电气组成上,防爆型消防侦察灭火机器人在电气上包括控制模块、运动驱动模块、参数采集模块、避障导航模块、通讯模块、电源管理模块以及故障诊断模块,系统结构图如图2所示。其中,手持控制台可实现与机器人的信息交互,包括信息的显示、无线发送和接收、操纵动作的解析和控制、数据参数存储及报警等功能。该控制台主要实现对消防侦察灭火机器人进行运动控制,对消防水炮系统等进行三维动态调整从而实现定点灭火功能。
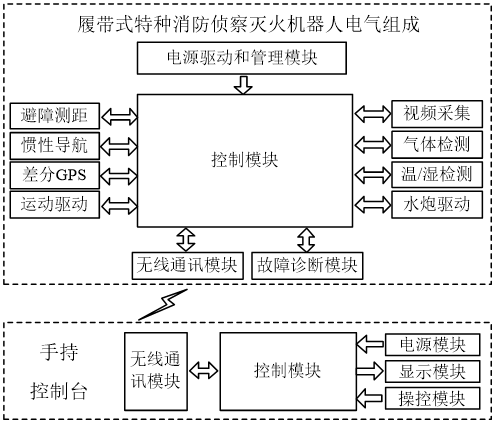
图2 消防侦察灭火机器人电气系统结构图
3. 防爆型消防侦察灭火机器人核心关键技术研究
为使侦察灭火机器人适用于复杂的恶劣环境,机器人的技术指标如下:防爆等级:Exd(ib)Ⅱb+H2T6Gb,防水等级:IP67,整机重量:≤800 kg, 载荷质量:≥200kg,水炮射程:≥80m,运行速度:≥1.5m/s, 爬坡角度:≥30度, 攀爬台阶高度:≥250 mm,跨越沟道宽度:≥300 mm, 续航能力:≥3h,遥控距离:≥2000m。
针对上述技术指标,本文对侦察灭火机器人的防护、动力学以及轻量化技术三方面进行了研究。
(1)消防侦察灭火机器人高危高湿环境下自保护防护性能技术研究
防爆型消防侦察灭火机器人采用GB3836防爆性能的结构设计方法,外部组件与内部壳体连接处采用隔爆和水密处理措施,转轴传动处采用小间隙隔爆处理,外部传感组件和执行组件等采用防爆材料等加工。为了进一步提升机器人耐高温性能,在机器人车体上加入自喷淋主动降温系统,当机器人拖动水带靠近和进入高温火场时,通过自喷淋降温系统对机器人上方和周围形成水幕,防止外部超高温环境损伤机器人内部电气系统,提高机器人的生存能力和适用能力。另外,特种移动底盘外侧的履带内部采用钢丝结构,以便机器人进入火场侦察遇到险情后能确保退回自救。
(2)机器人大负载下动力学优化的轻量化和高性能运动技术研究
机器人在拖动充满水的水带运动时,会受到后方水带变化的拖拽力而运动性能下降甚至失稳,另外机器人通过不同地形时,悬挂系统和驱动系统也会受到外部扰动作用,为提高机器人带负载能力和爬坡越障性能,建立了复杂地面环境下防爆消防侦察灭火机器人的动力学模型,对消防侦察灭火机器人的各类组件开展理论、受力仿真等研究,为消防侦察灭火机器人在复杂地面环境下实现高性能爬坡越障提供机械组件力学的理论和设计依据。同时针对机器人在后方拖动负载时的自身稳定难题,对消防侦察灭火机器人的各类运动模式(如直行、转弯等)开展了机体轻量化仿真研究,研究了机器人驱动组件与外部行走部件及外部行走组件与地面交互作用等之间的匹配性和作用力,为消防侦察灭火机器人在复杂地面环境下实现高性能爬坡越障提供作用力及相关性理论依据。
另外在上述机器人平台基础上,配合还研究了机器人驱动器的控制算法,采用自抗扰的闭环控制算法,将外部由于复杂地形变化导致的驱动器负载变化所引起的速度或位置扰动视为外部扰动进行实时补偿控制,提高了消防侦察灭火机器人在拖动负载时驱动的抗干扰性、高效性和运动精准性,使消防侦察灭火机器人不仅适用于复杂的非结构地面环境,更适合需要对机器人位置或速度进行精准控制的场合。
4. 防爆型消防侦察灭火机器人样机试验
侦察灭火机器人设计主要经过系统设计、各模块研制和调试、算法研究,后经系统联调形成机器人试验样机。样机完成后,首先进行了运动性能和功能测试,包括对机器人本体和手持控制台的通讯功能测试,对机器人的自喷淋降温功能验证,对机器人抗扰动性能验证等,然后进行了场地性能试验,最后经过实际场景综合试验。目前,机器人工作状态和性能指标良好,已部署于泰安、威海和烟台等消防中队、支队,以及烟台万华化学品厂等地。机器人的实物和消防演习现场如图3所示。

图3 防爆型消防侦察灭火机器人实物图和消防演习场景
5. 结束语
针对当前易燃易爆高危火灾现场,设计了一种高性能消防侦察灭火机器人,实现了对现场快速侦察和超远程三维定点灭火功能。为实现特种机器人关键技术指标,对机器人防护技术、轻量化技术进行了研究。消防演习和实地火灾扑救验证了所研发系统的性能,机器人代表了未来防爆特种消防侦察灭火机器人的发展方向,具有重要的科学价值和意义,并且为重大自然灾害应急和公共安全保证提供了有效技术和装备支撑,大大提高侦察救援效率并极大地降低人身财产损失,有效保障民生安全和维护社会稳定。
参考文献
[1] 傅智敏. 我国火灾统计数据分析[J]. 安全与环境学报, 2014, 14(6):341-345.
[2] 李海江. 特别重大火灾人员伤亡统计与分析[J]. 中国减灾, 2013(5).
[3] 党海昌. 消防机器人在我国灭火救援中的应用现状和前景分析[J]. 消防技术与产品信息, 2016(3):69-71.
[4] 崔虎威. 基于消防机器人灭火救援应用技术分析[J]. 2017(20):294-294.
[5] 张鹏. 我国消防管理存在的问题研究及对策[D]. 燕山大学.
本文由入驻作者撰写,未经授权禁止转载。
免责声明:本网站内容来自作者投稿或互联网转载,目的在于传递更多信息,不代表本网赞同其观点或证实其内容的真实性。文章内容及配图如有侵权或对文章观点有异议,请联系我们处理。如转载本网站文章,务必保留本网注明的稿件来源,并自行承担法律责任。
为你推荐



汽车行业应用BI,应该从哪个环节入手?
2025-01-10【走近匠人】周顺平:学无止境,方能成就匠心!
2025-01-102025世界机器人大会“领航峰会”大咖观点集锦
2025-01-102025世界机器人大会“未来峰会”大咖观点集锦
2025-01-10社区智能化解决方案
2025-01-04智慧医院解决方案
2025-01-04打造智能化小区解决方案
2025-01-04
推荐产品



推荐直播

直播回顾

微信扫码进入直播间
国兴智能
山东国兴智能科技股份有限公司

直播回顾

微信扫码进入直播间
云展会介绍

ABB

直播回顾

微信扫码进入直播间
配件机器人-零件介绍
ABB

直播回顾

微信扫码进入直播间
服务机器人-扫地机器人介绍
ABB
