

防爆型消防侦察机器人研发与应用
摘 要:当前每年火灾、化学品等物质的泄露、燃烧、爆炸等事故,给人民群众的生命安全和财产造成巨大损失。现有的针对常规室内结构的机器人无法进入高危灾害场所侦察现场情况。本文设计了一种替代工作人员进入复杂恶劣环境,并可对高危事故现场环境参数实时侦察的防爆型、高性能机器人,并对机器人进行了综合试验和典型应用场景验证,试验结果证明了防爆型消防侦察机器人代替人工作业的有效性。
关键词:特种机器人,消防侦察,履带式移动平台
1. 消防侦察机器人研发背景
火灾、爆炸等发生后,消防人员在高危事故现场救援和勘察中存在许多劣势。比如,在面临易燃易爆气体、有毒有害、高温浓烟等灾害情况时,由于缺少有效装备及设施,救援人员贸然采取行动必将给消防人员带来很大危险。消防人员虽然可着防护设备进入火场,需携带诸多探测设备进行火场参数测量,给消防员带来沉重的体力负担,甚至对爆炸场合等紧急情况的逃生带来障碍[1]。
目前国内的侦察机器人主要针对室内结构性环境,普通的轮式机器人无法适用于复杂的地面环境;常规的机器人因自身防护性能不足极易在充满易燃易爆气体的场所点燃危险源从而发生二次灾害[2-3]。
2. 消防侦察机器人整体结构设计与组成
针对上述需求,本文设计了适用于高危恶劣场所的防爆型消防侦察机器人,系统结构图如图1所示。侦察机器人主要包括:1.履带式移动底盘(1-1.本体、1-2.悬挂系统),2.侦察组件(2-1.回转云台、2-2.摄像系统、2-3.升降系统、2-4.环境探测传感器组),3.无线通讯组件,4.避障测距组件,5.运动驱动组件。
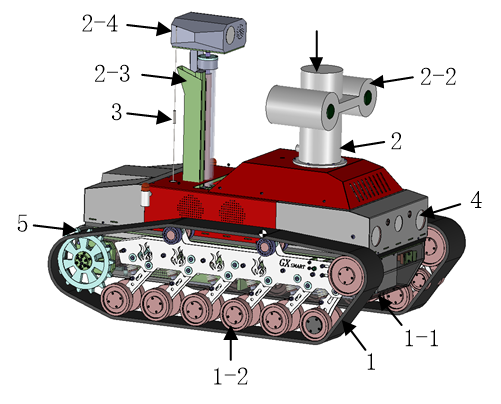
图1 消防侦察机器人机械系统结构图
电气上,包括控制模块、运动驱动模块、参数采集模块、避障导航模块、通讯模块、电源管理模块以及故障诊断模块,系统结构图如图2所示。
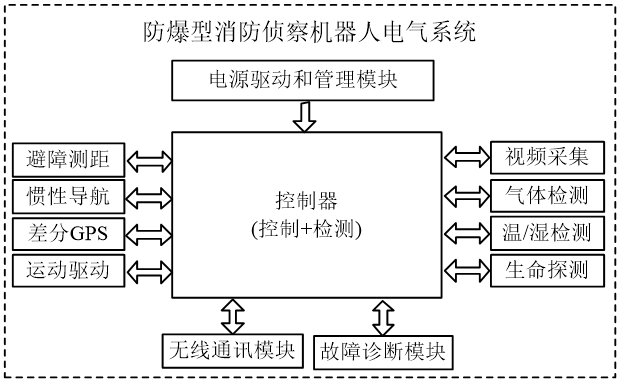
图2 消防侦察机器人电气系统结构图
侦察机器人通过无线通讯模块与地面控制站进行实时通讯并将机器人自身状态参数、采集的环境参数信息实时回传显示,另外,操纵人员还可通过地面控制站实时控制指挥机器人侦察作业。
3.消防侦察机器人核心关键技术研究
为使侦察机器人适用于复杂的恶劣环境,机器人的技术指标如下:防爆等级:Exd(ib)Ⅱb+H2T6Gb,防水等级:IP67,整机重量:≤500 kg, 运行速度:≥1.5m/s, 爬坡角度:≥40度(可爬楼梯), 攀爬台阶高度:≥280 mm, 续航能力:≥4h。
针对上述指标,本文对侦察机器人的动力学以及控制技术进行了研究。
(1)研究了机器人动力学优化技术提高移动平台爬坡越障性能
本文建立了复杂地面环境下防爆消防侦察机器人的动力学模型,对消防侦察机器人的各类组件开展理论、受力仿真等研究,论证防爆消防侦察机器人尤其是运动机械组件的结构、位置等合理性,为消防侦察机器人在复杂地面环境下实现高性能爬坡越障提供机械组件力学的理论和设计依据。
通过建立复杂地面环境下防爆消防侦察机器人的动力学模型的运动学模型建模,对消防侦察机器人的各类运动模式(如直行、转弯等)开展理论、仿真研究,研究驱动组件与外部行走部件与地面交互作用等之间的作用力,为机器人在复杂地面环境下高性能爬坡越障提供依据,也为目标驱动型防爆消防侦察机器人算法研究提供平台基础。
(2)研究了机器人自抗扰控制算法提高机器人控制抗扰性能和控制精度
开展了基于目标驱动原则的控制算法研究,引入反馈机制,侦察机器人中的控制器首先进行地图构建并确定机器人行走路线和目标点坐标位置;在该过程中,控制器实时通过避障及测距模块等实现多传感器融合并提取相关信息,将处理后的有效数据与惯性导航模块融合实现对消防侦察机器人的驱动,降低机器人对控制器实时驱动策略的依赖性。在目标驱动策略下,控制器通过自抗扰控制算法实现对左右两个伺服驱动器的控制,将外部由于复杂地形变化导致的驱动器负载变化所引起的速度或位置扰动视为外绕进行实时补偿控制,提高了消防侦察机器人目标驱动算法的抗干扰性、高效性和运动精准性,使消防侦察机器人不仅适用于复杂的非结构地面环境,更适合需要对机器人位置或速度进行精准控制的场合。
4.消防侦察机器人样机试验验证
侦察机器人设计主要经过系统设计、各模块研制和调试、算法研究,后经过系统联调形成机器人试验样机。目前,机器人工作状态和性能指标良好,已部署于烟台、威海消防中队、万华化学品厂等多个场景。机器人的实物图如图3所示。

图3 防爆型消防侦察机器人实物图
5. 结束语
本文设计了一种适用于易燃易爆等高危恶劣场所的防爆型消防侦察机器人,实现了代人消防人员进入高危灾害现场,并对机器人的高性能爬坡越障技术以及高精度抗扰动技术进行了深入研究,提高了非结构复杂环境下机器人的全地形通过性、机动性、高可靠性和生存率。未来,防爆型消防侦察机器人将有效提高消防侦察效率并极大地降低人身财产损失。
参考文献
[1] 刘琪. 基层火灾事故调查工作现状与策略[J]. 消防界(电子版), 2019(8).
[2] 陈建斌. 消防机器人在我国灭火救援中的应用现状和前景分析[J]. 地球, 2017(10):98-98.
[3] 倪银堂, 吕迪洋, 王振豪. 消防机器人的研究现状综述与展望[J]. 自动化应用, 2017(2):28-29.
本文由入驻作者撰写,未经授权禁止转载。
免责声明:本网站内容来自作者投稿或互联网转载,目的在于传递更多信息,不代表本网赞同其观点或证实其内容的真实性。文章内容及配图如有侵权或对文章观点有异议,请联系我们处理。如转载本网站文章,务必保留本网注明的稿件来源,并自行承担法律责任。
为你推荐



汽车行业应用BI,应该从哪个环节入手?
2025-01-10【走近匠人】周顺平:学无止境,方能成就匠心!
2025-01-102025世界机器人大会“领航峰会”大咖观点集锦
2025-01-102025世界机器人大会“未来峰会”大咖观点集锦
2025-01-10社区智能化解决方案
2025-01-04智慧医院解决方案
2025-01-04打造智能化小区解决方案
2025-01-04
推荐产品



推荐直播

直播回顾

微信扫码进入直播间
国兴智能
山东国兴智能科技股份有限公司

直播回顾

微信扫码进入直播间
云展会介绍

ABB

直播回顾

微信扫码进入直播间
配件机器人-零件介绍
ABB

直播回顾

微信扫码进入直播间
服务机器人-扫地机器人介绍
ABB
