

机器人动力学分析
摘要要对机器人实施精确控制,建立机器人的动力学模型是一个非常重要的环节,动力学是研究物体的运动和作用力之间的关系。现在所用的分析方法很多,有拉格朗日(Lagrange)方法,牛顿-欧拉(Newton-Euler)方法,高斯(Gauss)方法,凯恩(Kane)方法,旋量(对偶数)方法和罗伯逊-魏登堡(Roberson-Wittenburg)方法等
关键词机械动力学、凯恩方程、动力学方程、参数估计法、系数估计法
0 引言就机器人技术而言,机器人设计是很重要的一个方面。目前,对于机器人机构设计,绝大多数是以运动学要求和强度要求来确定,很少考虑机器人动力学性能。然而,‘随着机器人技术的发展,要求机器人有较高的操作速度,准确的定位及良好的控制性能。因此,在机器人设计中有必要考虑其动力学性能的影响。机器人动力学特性包括:各关节间的藕合作用,哥氏力和离心力的非线性影响,以及取决于构形的变化惯量。由于当机器人运行于高速条件下时,整个系统将处于一种不稳定的状态。因此,本文对高速运动条件下的机器人动力学也进行了深入的研究。除次之外,对机器人动力学模型建立、验证以及动力学分析也提出了新的方法。
1、机器人技术研究现状及发展趋势机器人技术集机械、信息、材料、智能控制、生物医学等多学科于一体, 不但自身技术附加值高,产品应用范围广, 而且已经成为重要的技术辐射平台, 对增强军事国防实力、提高处理突发事件水平、带动整体经济发展、改善人民群众生活水平都具有十分重要的意义。
1.1国内外机器人研究现状我国目前已初步形成了水下自主机器人、消防机器人、搜救/排爆机器人、仿人机器人、医疗机器人、机器人护理床和智能轮椅、烹饪机器人等系列产品, 展示出一定的市场前景。
在水下机器人方面, 由中国船舶重工集团公司702 所、中国科学院沈阳自动化研究所和声学研究所等多家国内科研机构与企业联合攻关, 设计完成的7000 米级“蛟龙号” 顺利完成了5000 米海试。在工业机器人研究方面, 主要以企业研究成果为主, 如沈阳新松机器人自动化股份有限公司在焊接机器人及自动导引车 (AGV) 等方面取得重要市场突破,广州数控设备有限公司研发了自主知识产权的 RB 系列工业机器人昆山华恒焊接股份有限公司侧重于焊接机器人研究值得一提的是, 天津大学在并联机器人上取得了重要进展, 相关技术获得美国专利。在医疗康复机器人研究方面, 北京航空航天大学机器人研究所联合海军总医院, 在国内率先进行医疗脑外科机器人研究, 突破了机器人机构综合与优化、医学图像处理、导航定位、手术规划等关键技术, 于 2003 年设计出了适合辅助脑外科手术的机器人。在教育机器人研究推广方面, 上海未来伙伴机器人有限公司于 1998 年推出全球第一台教育机器人产品 AS-MII 能力风暴机器人,北京博创兴盛科技有限公司于 2007 年及 2009 年分别研制成功了面向高校机器人技术教育的 “创意之星” 模块化机器人教学套件及 “未来之星” 移动机器人平台。在反恐排爆危险作业机器人研究应用方面, 北京博创兴盛科技有限公司研制成功的反恐排爆机器人及车底检查机器人成功应用于北京两会、2008 奥运会以及 2010 亚运会, 装备 100 台套以上并出口,沈阳自动化研究所研制成功了可携带侦察机器人、反恐防暴系列机器人、旋翼飞行机器人、超高压输电线路巡检机器人系统等多款特殊环境下工作机器人。
1.2机器人研究前沿关键技术
1.21仿生材料与结构
从仿生学角度出发, 吸收借鉴生物系统的结构、性状、原理、行为以及相互作用, 能够为机器人的功能实现提供必要的技术支撑, 其中仿生皮肤、人工肌肉及结构驱动一体化设计是当前及未来服务机器人发展的重要课题.目前来看, 仿生材料与机构能够为未来机器人实现多功能高效率发展提供必要的技术储备, 一个很重要的问题是必须具备相应的光机电微纳加工工艺及传感驱动执行一体化设计能力, 这对于仿生结构材料的未来应用至关重要。
1.22模块化自重构
模块化自重构机器人通过对多个单一的模块化智能单元进行可变构形设计、运动规划及控制, 以达到提升机器人运动能力、负载能力及对环境适应能力的效果自重构机器人的核心问题主要体现在模块的几何拓扑分布及相应的整体刚度. 未来将在机器人与外界环境的动力学交互方面进行研究. 从自重构机器人发展的初衷来看, 未来自重构机器人面临着大规模机载并行计算及结构化或是非结构化环境下长时间完全自主能力实现的挑战。
1.23复杂环境下机器人动力学控制
随着人类探索空间的扩大及对任务需求的提高, 未来服务机器人的工作环境将是复杂多变的, 高动态性、高适应性、高负载能力是服务机器人特别是户外机器人发展的方向之一. 以机械臂为代表的工业机器人必须满足对高负载及高速的双重需求, 但是高负载与高速将给机器人带来额外的影响。
1.24智能认知与感知
智能认知与感知是机器人与人、机器人与环境进行交互的基础, 目前与服务机器人密切相关的智能认知感知技术包括脑生肌电认知、城市环境下移动机器人对环境的感知与识别以及智能空间等 3 方面. 未来智能认知与感知主要是在传感器技术发展的基础上, 进行大量数据有效分类、归纳, 并提取可靠有效信息, 凝聚成反映人 – 机 – 环境交互关系的特征数据网, 并结合人工智能的发展及高效能计算能力的实现, 为服务机器人的智能化发展提供基础保障。
1.25多模式网络化交互
机器人多模式网络化交互, 主要体现在两个方面, 一是机器人之间的组网协调, 包括单一类型机器人群体及多类型机器人群体协作问题. 另一方面是 MEMS 技术、应用软件及网络通讯新技术的发展催生出的新型人机交互模式. 在单一类型机器人群体的交互研究方面, MIT 的 Schwager 等应用一致学习控制算法于地面群体机器人实现相对于局部未知环境下目标传感源的收敛分布, 这类机器人的行为属性较为一致。
1.26微纳系统
服务机器人的一个重要应用是希望其能够在狭小空间里开展探测或是执行任务. 目前, 微纳型医疗机器人及军用侦察机器人正成为服务机器人研究的一个热点, 而其核心技术在于创新并集成多功能低功耗传感及驱动模块. 2011 年瑞士 Eidgeno¨ssische Technische Hochschule Zu¨rich (ETHZurich) 的Nelson等首次提取眼内投影映射关系, 并应用于基于 CAD 模型建立的定位模型, 设计了 3 mm大小的微型眼科机器人, 利用无线电磁技术实现了机器人三维空间精确控制。
1.3服务机器人发展趋势与展望
服务机器人技术发展主要趋势为智能化、标准化、网络化. 具体为: 由简单机电一体化装备, 向以生机电一体化和多传感器智能化等方面发展; 由单一作业, 向服务机器人与信息网络相结合的虚拟交互、远程操作和网络服务等方面发展; 由研制单一复杂系统, 向将其核心技术、核心模块嵌入于高端制造等相关装备方面发展. 另外服务机器人的市场化要求家庭化、模块化、产业化成为未来服务机器人应用发展的趋势.服务机器人技术越来越向智能机器技术与系统方向发展, 其应用领域向助老助残、家用服务、特种服务等方面扩展, 在学科发展上与生机电理论与技术、纳米制造、生物制造等学科进行交叉创新, 研究的科学问题包含新材料、新感知、新控制和新认知等方面. 而涉及服务机器人的需求与创新、产业、服务及安全之间的辩证关系依然是其发展的核心原动力与约束力。
2、机器人动力学方程
2.1机器人动力学方程的各种建模方法
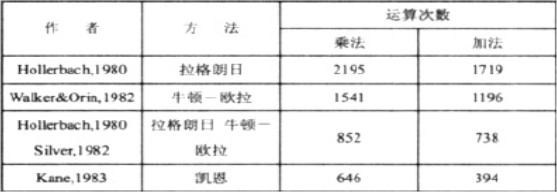
动力学是研究物体的运动和作用力之间的关系。现在所用的分析方法很多,有拉格朗日(Lagrange) 方法,牛顿-欧拉(Newton-Euler)方法,高斯(Gauss)方法,凯恩(Kane)方法,旋量(对偶数)方法和罗伯逊-魏登堡(Roberson-Wittenburg)方法等。凯恩方法既适合于完整系统,也适合于非完整系统。对于机器人机构这样多自由度的复杂系统,应用凯恩方法可以减少计算步骤,提高计算效率。从表 1 可见凯恩方程法是一种比较适合于计算机的方法。
表 1.
各种机器人动力学建模方法的运算量表
2.2应用凯恩方法建立机器人机构的动力学方程
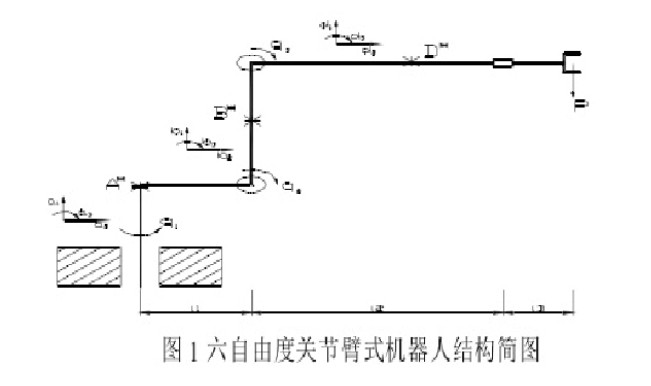
应用凯恩方法建立机器人机构的动力学方程,连杆 1、2、3用 A、B、D来表示,如图 1 所示。固定在 A 上的坐标以三个单位矢量 a1、a2、a3表示;固定在 B 上的坐标系以三个单位矢量 b1、b2、b3 来表示;固定在 D 上的坐标系以三个单位矢量 d1、d2、d3来表示。关节变量为广义坐标 q1、q2、q3,A*、B*、D* 为连杆 A、B、D 的质心,P 为载荷中心。
3、高速运动下的机器人动力学研究
3.1机器人动力学分析
要实现机器人优异的控制性能,首先必须对机器人系统进行动力学分析,利用牛顿欧拉方程,对机器人进行了动力学分析,其迭
代公式如下所示
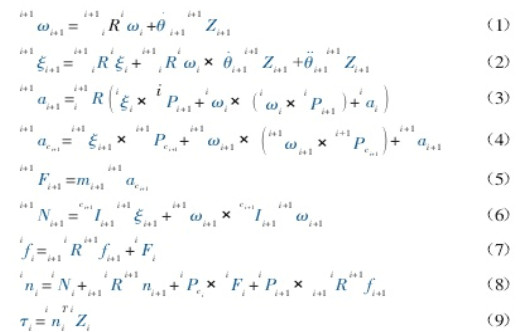
由此,可得机器人样机的动力学方程表达式如下所示:
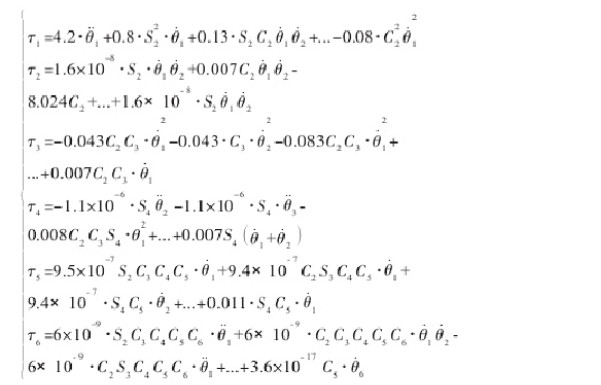
3.2机器人动力学要素分析
将机器人的动力学表达式以矩阵的形式加以表示,可以表述如下:

由公式(10)可以看出,作用于机器人各关节电机之上的外加负载是一个随着机器人的关节角θ、关节角速度θ、关节角加速度θ变化的量,由于关节电机本身的参数一般不会发生变动,由此造成了机器人的各关节被控对象传递函数为一个随时间变化的表达式,当机器人高速运动时,传递函数的这种变动不可忽略,这就要求机器人的关节控制器参数也随着变动,以满足高速控制的要求。
4、机器人动力学建模
要对机器人实施精确控制,建立机器人的动力学模型是一个非常重要的环节。机器人的动力学模型通常表示成拉格朗日方程形式。用系统辨识的方法建立机器人的动力学模型有两种途径,其一是系数估计法;其二是在机器人几何参数已知的情况下,对各项系数中的动力学参数进行估计,称之为参数估计法。
4.1系数估计法
1988年,K1Khosla和T.Kanade对直接驱动型(CMUDD-II型)机器人的惯性量系数进行辨识[1],输入信号是各关节的驱动转矩,输出信号为各关节的角位移、角速度、角加速度。在低速运动的条件下,忽略哥氏和离心项以及重力项,通过分析输入输出关系分别表示机械臂的关节角加速度、关节角速度、关节角。
4.2动力学参数估计法
动力学参数估计法是先得到机器人各连杆的动力学参数,而这些量是与机器人运动无关的常量。然后根据机器人的各项系数与动力学参数之间的关系,计算出各项系数,从而得出机器人的动力学方程。
5、结语
机器人作为一个具有巨大社会关注度的、特色鲜明的典型高新技术, 是 21 世纪高技术制造业与现代服务业的重要组成部分, 也是我国高科技产业发展的一次重大机遇, 对于提升国家核心竞争力具有重要战略意义。
来源:百度文库
版权归原作者所有,如有侵权,请联系删除。
免责声明:本网站内容来自作者投稿或互联网转载,目的在于传递更多信息,不代表本网赞同其观点或证实其内容的真实性。文章内容及配图如有侵权或对文章观点有异议,请联系我们处理。如转载本网站文章,务必保留本网注明的稿件来源,并自行承担法律责任。
为你推荐


全方位智慧环保解决方案
2021-09-17社区智能化解决方案
2021-09-172021世界机器人大会“未来峰会”大咖观点集锦
2021-09-152021世界机器人大会“领航峰会”大咖观点集锦
2021-09-15【走近匠人】周顺平:学无止境,方能成就匠心!
2021-08-23汽车行业应用BI,应该从哪个环节入手?
2021-08-23进击四十年|周剑:让智能机器人走进千家万户
2021-08-23
推荐产品



推荐直播

直播回顾

微信扫码进入直播间
国兴智能
山东国兴智能科技股份有限公司

直播回顾

微信扫码进入直播间
云展会介绍

ABB

直播回顾

微信扫码进入直播间
配件机器人-零件介绍
ABB

直播回顾

微信扫码进入直播间
服务机器人-扫地机器人介绍
ABB
