成本不超1万美元!UC伯克利发布人形机器人,解析造价背后的秘密
近日,加州大学伯克利分校的研究团队公布了一款名为"Berkeley Humanoid"的中型人形机器人研究平台。
令人惊叹的是,这个体重仅16公斤的人形机器人不仅能在各种户外地形上自如行走,还能承受大幅度的外部干扰而保持平衡。它甚至可以连续行走数百米,在陡峭的未铺砌小径上行走自如,并能进行单腿和双腿跳跃等高难度动作。
而且,整个机器人的成本不超10,000美元!
这款机器人专为学习型控制算法而设计,具有可靠性高、轻量化、低模拟复杂性等特点,为人形机器人的学习控制研究开辟了新的道路。让我们深入了解这个项目,看看它如何应对当前人形机器人研究中的挑战,以及它带来的创新解决方案。
为学习而生的设计理念
当前,人形机器人研究面临多重挑战。大型机器人操作复杂需团队协作,且其高减速比传动装置限制了高级学习算法的应用。小型机器人则易于操作,实验环境宽容,适合在狭小空间测试。但短腿设计带来机械挑战,需紧凑高功率执行器,这些组件昂贵且难以获取。控制上,中型短腿机器人因低重心和短腿特性,稳定性差、敏感度高,需高频精确控制以应对扰动,实现稳定行走。
面对这些挑战,Berkeley研究团队提出了一个创新的解决方案:打造一个专门为学习型控制算法设计的中型人形机器人平台。研究团队在设计过程中充分考虑了学习算法的需求,从硬件设计到控制方法都做了精心的优化。
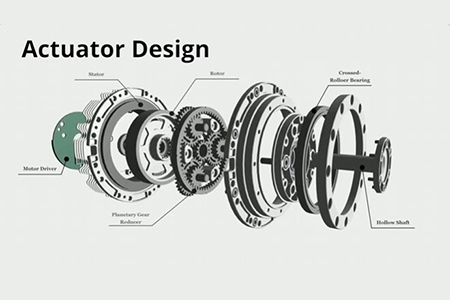
首先,为了降低仿真复杂度,研究人员去除了所有弹性和能量吸收部件,如弹簧和阻尼器,以及机器人运动链中的闭合运动链。大多数执行器都可以直接安装并用作关节,这样转子惯量可以通过在关节质量矩阵的对角线上添加电枢来轻松模拟,其他执行器因素也可以与关节相同方式建模。
其次,为了缩小仿真-现实差距,研究人员选择了行星齿轮箱和准直驱(QDD)传动比,这只会引入很小的摩擦不确定性,易于在关节空间建模。此外,团队还使用EtherCAT进行通信,确保了0.5-2毫秒的极低延迟,使执行器可以被模拟为无延迟的力矩源。
这些设计使得Berkeley人形机器人能够在NVIDIA A4500 GPU上以每秒超过90,000步的效率进行精确仿真,大大提高了学习算法的训练效率。
可靠且低成本的硬件设计
除了优化学习效果,Berkeley人形机器人在硬件设计上也做了大量创新,以提高可靠性并降低成本。
首先,研究团队使用的材料使得机器人结构轻量化的同时还能承受较大冲击。为了提高电缆的耐用性,大多数执行器采用了中空轴设计,最大限度地减少了关节运动造成的磨损。
此外,定制的QDD执行器使机器人能够在不添加应变仪的情况下估计关节扭矩。可靠的关节扭矩感应使得可以使用广义动量观测器来估计每个脚的接触力矩,而无需接触传感器或力/扭矩传感器,进一步提高了机器人的可靠性。
文章来源于网络,如有侵权请联系删除。
免责声明:本网站内容来自作者投稿或互联网转载,目的在于传递更多信息,不代表本网赞同其观点或证实其内容的真实性。文章内容及配图如有侵权或对文章观点有异议,请联系我们处理。如转载本网站文章,务必保留本网注明的稿件来源,并自行承担法律责任。